Lắp ráp robot
Giải Chuyên đề Tin học 10 Bài 4: Thực hành: Lắp ráp các bộ phận của Robot giáo dục
Haylamdo biên soạn và sưu tầm lời giải Bài 2 trang 22 Chuyên đề Tin học 10 trong Bài 4: Thực hành: Lắp ráp các bộ phận của Robot giáo dục sách Cánh diều. Với lời giải ngắn gọn nhưng đủ ý hy vọng sẽ giúp các học sinh dễ dàng nắm được cách làm bài tập trong Chuyên đề Tin 10.
Bài 2 trang 22 Chuyên đề Tin học 10: Lắp ráp robot
Lời giải:
Chú ý: Đường màu đỏ thể hiện vị trí lắp ráp các bộ phận.
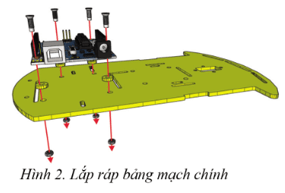
1. Lắp ráp bảng mạch chính:
* Chuẩn bị:
- 1 khung cơ khí
- 1 mạch Arduino
- 4 bộ bu lông, đai ốc M3 × 12mm
- 4 vòng đệm.
* Tiến hành: Lắp ráp như mô tả Hình 2.
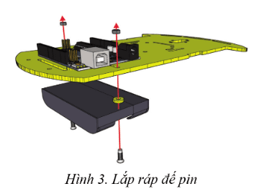
2. Lắp ráp để pin
* Chuẩn bị
- 1 đế pin AA 6 viên
- 2 bộ bu lông, đai ốc M3 × 12 mm
- 2 vòng đệm
* Tiến hành: Lắp ráp như mô tả ở Hình 3
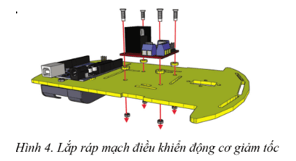
3. Lắp ráp mạch điều khiển động cơ
* Chuẩn bị
- 1 mạch điều khiển động cơ
- 4 bộ bu lông, đai ốc M3 x 12 mm
- 4 vòng đệm
* Tiến hành: Lắp ráp như mô tả Hình 4
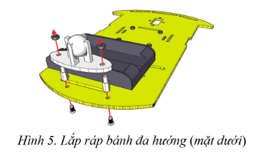
4. Lắp ráp bánh đa hướng
* Chuẩn bị
- 1 bánh đa hướng
- 2 bộ bu lông, đai ốc M3 × 12 mm
- 2 cọc nhựa
* Tiến hành
Lắp ráp như mô tả Hình 5
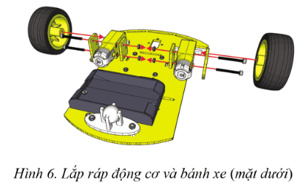
5. Lắp ráp động cơ và bánh xe
* Chuẩn bị
- 2 động cơ giảm tốc
- 2 bánh xe
- 4 bộ bu lông, đai ốc M3 × 30 mm
- 4 giá giữ động cơ
* Tiến hành: Lắp ráp như mô tả ở Hình 6
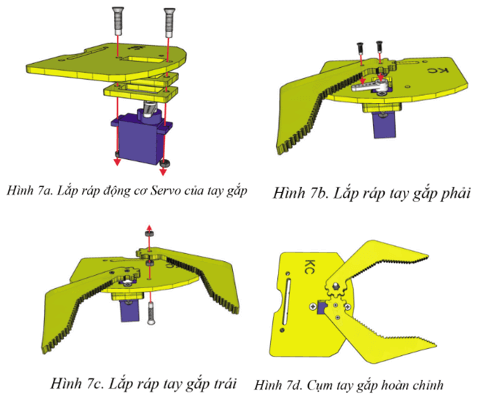
6. Lắp ráp cụm tay gắp
* Chuẩn bị
- 1 khung tay gắp
- 1 bộ động cơ Servo (đã kèm vít)
- 3 bộ bu lông, đai ốc M3 × 12 mm
* Tiến hàng: Lắp ráp như mô tả ở Hình 7a, 7b, 7c, 7d
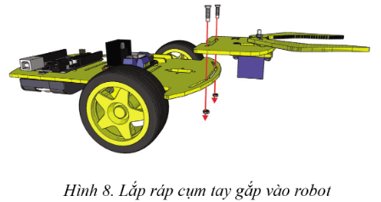
7. Lắp ráp cụm tay gắp vào robot
*Chuẩn bị
- Khung robot đã lắp ráp
- Một cụm tay gắp
- 2 bộ bu lông, đai ốc M3 × 12 mm
* Tiến hành: Lắp ráp theo mô tả ở Hình 8
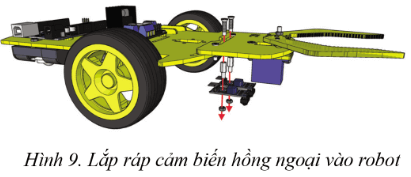
8. Lắp ráp cảm biến hồng ngoại vào robot
* Chuẩn bị
- 2 mạch cảm biến hồng ngoại
- 2 cọc nhựa
- 2 bộ bu lông, đai ốc M3 × 12 mm
* Tiến hành: Lắp ráp theo mô tả Hình 9
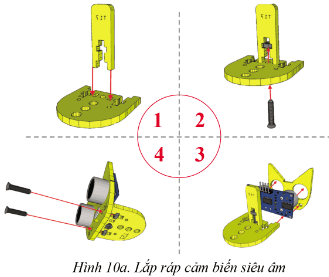
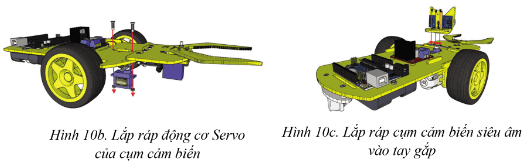
9. Lắp ráp cụm cảm biến siêu âm cho robot
* Chuẩn bị
- 1 bộ động cơ Servo (đã kèm vít)
- 3 bộ bu lông, đai ốc M3 × 12 mm
- Giá đỡ cảm biến siêu âm
- Cảm biến siêu âm
* Tiến hành: Lăp ráp theo mô tả Hình 10a, 10b, 10c
10. Kết nối mạch điện cho robot
* Chuẩn bị:
- 1 mạch Arduino
- 1 mạch điều khiển động cơ L298
- 2 động cơ giảm tốc
- 1 động cơ servo
- 1 cảm biến siêu âm
- 1 Breadboard
- 1 nguồn 9v
- 8 dây jum kết nối đực cái 20cm
- 7 dây jum kết nối đực đực 20cm
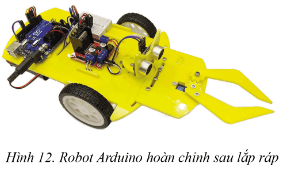
b. Tiến hành: kết nối các bộ phận điện, điện tử theo sơ đồ nguyên lý và bảng nối dây ở Hình 11.
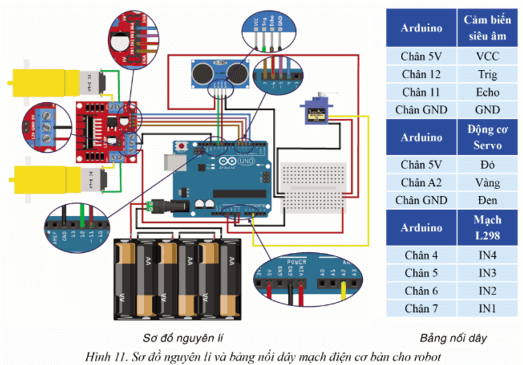
Kiểm tra tình trạng sẵn sàng hoạt động của robot Arduino sau khi lắp ráp (Hình 12) bằng cách: Tháo các chân jum kết nối tại chân 4, 5, 6, 7 của bảng mạch Arduino (hình 11) và kết nối các chân này vào Breadboard, sao cho chân IN1, IN3 của L298 được cấp nguồn 0V (GND) và chân IN2, IN4 của chân L298 được cấp nguồn 5V. Nếu robot đã di chuyển tiến lên thì robot đã sẵn sàng hoạt động.