Giải Chuyên đề Tin học 10 trang 52 Kết nối tri thức
Haylamdo biên soạn và sưu tầm lời Giải Chuyên đề Tin học 10 trang 52 trong Bài 11: Dẫn đường tự động cho robot sách Kết nối tri thức. Với lời giải ngắn gọn nhưng đủ ý hy vọng sẽ giúp các học sinh dễ dàng nắm được cách làm bài tập Chuyên đề Tin 10.
Chuyên đề Tin học 10 trang 52 Kết nối tri thức
Câu hỏi trang 52 Chuyên đề Tin học 10: Vì sao cảm biến dò đường thường được lắp ghép với robot ở dưới gầm của robot tự hành, ngay sát phía trước?
Lời giải:
Lắp ghép cảm biến dò đường ở dưới gầm robot để phát hiện được bề mặt di chuyển phía dưới và cần lắp gần với mặt đường do cảm biến chỉ phát hiện được bề mặt hay hấp thụ ở khoảng cách gần.
Hoạt động 3 trang 52 Chuyên đề Tin học 10: Dẫn đường với cảm biến dò đường 4 mắt.
Đọc, thảo luận nhóm về câu lệnh lập trình cảm biến đò đường bốn mắt và cách thức dẫn đường cho robot với cảm biến bốn mắt.
Lời giải:
* Câu lệnh lập trình cảm biến đò đường bốn mắt:
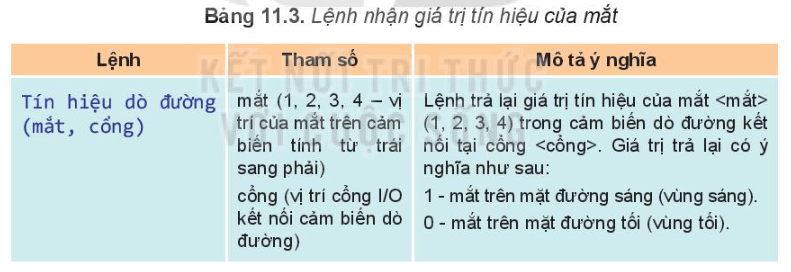
- Cảm biến dò đường bốn mắt sẽ có tín hiệu được đánh số thứ tự 1,2,3,4 từ trái sang phải theo hướng nhìn của robot.
- Cảm biến dò đường bốn mắt giúp phát hiện được đường di chuyển có ngã ba hoặc ngã tư, do vậy robot có thể dò chính xác hơn.
- Lệnh nhận giá trị tín hiệu của mắt trong cảm biến dò đường bốn mắt cũng tương tự như cảm biến dò đường hai mắt.
* Cách thức dẫn đường cho robot với cảm biến bốn mắt:
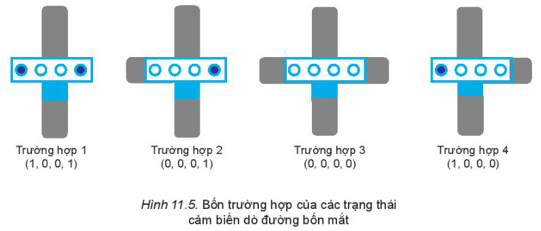
Mỗi mắt của cảm biến dò đường bốn mắt có hai giá trị tín hiệu bằng 0 và bằng 1. Do đó tổng cộng chúng ta có 24 = 16 trường hợp các tổ hợp giá trị tín hiệu từ 4 mắt. Mỗi tổ hợp có dạng (a1, a2, a3, a3, a4) với ak bằng 0 hoặc 1 là giá trị tín hiệu của mắt thứ k trong cảm biến. Hình 11.5 mô tả bốn trường hợp điển hình của trạng thái cảm biến dò đường 4 mắt trên thực địa khi gặp ngã ba, ngã tư.
Ví dụ: (1,0,0,1) tương ứng với trạng thái mắt 2, 3 nằm ở vùng tối, mắt 1 và 4 ở vùng sáng - robot chuyển động theo đường thẳng.
Lời giải bài tập Chuyên đề học tập Tin học 10 Bài 11: Dẫn đường tự động cho robot Kết nối tri thức hay khác: